Development of Model-Based Continual-Reinforcement Learning Mechanisms for Aerial Robots to Enable Rapid Adaptation to Unexpected Changes and Disturbances Effects
The original contribution of this research is the development of continual learning mechanisms that enable aerial robots to improve their performance by rapidly adapting to sudden changes in the suspended payload and the operating environment using a model-based continual-reinforcement learning technique.
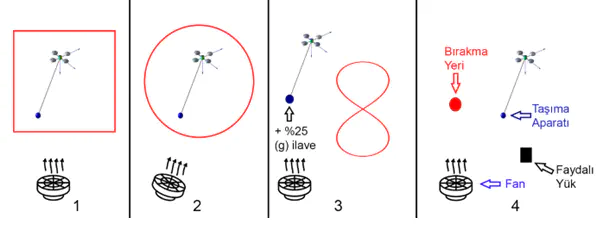
A continual learning algorithm will be proposed to improve the ability of aerial robots to adapt to various loads and disturbances through online learning. The model-based continual-reinforcement learning algorithm includes training and testing phases. In the training phase, the dynamic model parameters and adaptation parameters will be updated under various tasks. After the parameters of the tether dynamics in the system, which require advanced expert knowledge and mathematical modelling, are determined in the training phase, they will be used in the test phase, and performance evaluations will be made under previously seen and unseen tasks.
Ali Tahir Karasahin
Assistant Professor
I’m Assistant Professor at Necmettin Erbakan University and Visiting Research Fellow in Bristol Robotics Laboratory at University of Bristol. My research interests include learning-based control and design in aerial robots.