Ali Tahir Karasahin
Ali Tahir Karasahin
Home
Publications
Projects
Teaching
Blog
Contact
Light
Dark
Automatic
2
Maintaining Plasticity in Reinforcement Learning A Cost-Aware Framework for Aerial Robot Control in Non-stationary Environments
Maintaining Plasticity in Reinforcement Learning A Cost-Aware Framework for Aerial Robot Control in Non-stationary Environments
Ali Tahir Karasahin, Ziniu Wu, Basaran Bahadir Kocer
PDF
Cite
DOI
Tendon-driven Grasper Design for Aerial Robot Perching on Tree Branches
Tendon-driven Grasper Design for Aerial Robot Perching on Tree Branches
Haichuan Li, Ziang Zhao, Ziniu Wu, Parth Potdar, Long Tran, Ali Tahir Karasahin, Shane Windsor, Stephen G. Burrow, Basaran Bahadir Kocer
PDF
Cite
DOI
Effect of Different Hinge Angles on Control Performance Metrics and Disturbance Rejection in Swashplateless Micro Aerial Robots.
Effect of Different Hinge Angles on Control Performance Metrics and Disturbance Rejection in Swashplateless Micro Aerial Robots
Ali Tahir Karasahin
PDF
Cite
DOI
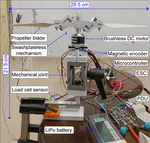
Co-Stand Swashplateless Micro Aerial Robot Test Stand
Co-Stand Swashplateless Micro Aerial Robot Test Stand
Ali Tahir Karasahin, Gokhan Gungor
PDF
Cite
DOI
Characterization of different hinge angles for swashplateless micro aerial robots
Characterization of different hinge angles for swashplateless micro aerial robots
Ali Tahir Karasahin
PDF
Cite
DOI
Performance Comparison of Different Fuzzy Logic Controllers on Vehicle-Caravan Systems
Performance Comparison of Different Fuzzy Logic Controllers on Vehicle-Caravan Systems
Ali Tahir Karasahin, Mehmet Karali
PDF
Cite
DOI
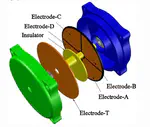
A new capacitive rotary encoder based on analog synchronous demodulation
A new capacitive rotary encoder based on analog synchronous demodulation
Ali Tahir Karasahin, Mehmet Karali, Mehmet Akif Erismis, Oguzhan Keles, Mustafa Kocak
PDF
Cite
DOI
Cite
×